Messtechnik - Das Puls-Laufzeitverfahren
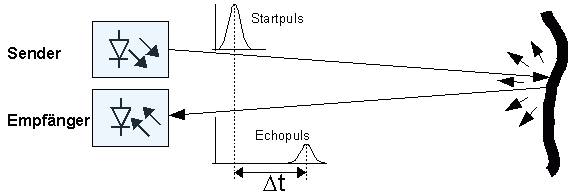
Beim Puls-Laufzeitverfahren (auch Lichtlaufzeit- oder time-of-flight-Messung genannt), werden vom Sender (in der Regel
eine Laserdiode) kurze Lichtpulse ausgesendet, die von Objekten in Ausbreitungsrichtung reflektiert oder gestreut werden.
Ein Teil dieses Lichts kann vom Empfänger als Echopuls detektiert werden. Der Abstand zum Objekt ist direkt proportional
zu der Zeitdauer, die zwischen dem Senden des Lichtpulses und dem Empfang des Echopulses vergeht.
Messauflösung und -genauigkeit
Da sich der Lichtpuls mit Lichtgeschwindigkeit (c = 299792 km/s) ausbreitet, sind die
Messzeiten sehr kurz. Bei einem Abstand von 10 m zum Objekt ist die Messung schon
nach ca. 66,7 ns beendet. Man benötigt für so kurze Messzeiten zwar keine besonders
genaue, dafür aber eine hoch auflösende Zeitmessung. Mit einer Auflösung von 1 ns
erreicht man eine Messauflösung von 'nur' 15 cm. Es ist daher klar, daß bei einer rein
digitalen Zeitmessung die Stoppuhr mit einer Frequenz jenseits der 1 GHz-Grenze getaktet wird.
Kombiniert man die digitale Messung mit einem analogen Signal, dann läßt sich der
Basistakt prinzipiell um die Auflösung des verwendeten Analog-Digital-Konverters
verbessern.
Aber auch die Amplitude des Echosignals hat einen Einfluss auf die Messgenauigkeit.
Wird ein Lichtpuls nur schwach reflektiert, ist die Amplitude kleiner und damit auch
die Flankensteilheit. Der Echopuls erreicht daher später die Triggerschwelle des
Empfängers, so daß die Stoppuhr etwas verzögert angehalten wird. Man versucht
dieses Verhalten dadurch zu kompensieren, indem man eine oder mehrere Eigenschaften
des Echopulses misst: die Pulsbreite, die Pulsamplitude oder die Pulsenergie.
Mit Hilfe einer abgespeicherten Kennlinie wird diese Fehler entsprechend kompensiert.
Da die Form des Echopulses von bedeutung ist, muß natürlich auch die Form des Startpulses
ideal sein. Da die Pulsenergie durch verschiedene Randbedingungen limitiert
ist (z.B. thermische Verluste, Einhaltung der Laserklasse), muß der Puls möglichst kurz
und die Amplitude maximal sein.
Störeinflüsse
Störeinflüsse ergeben sich meist durch Schnee, Regen, Nebel (Dampf) und Staub. Wird
der vom Sender ausgestrahlte Laserstrahl an zu vielen Teilchen in der Luft reflektiert,
können sich diese vielen kleinen Echosignale zu einem so großen Echopuls addieren, das
die Triggerschwelle des Empfängers überschritten und die Messung vorzeitig gestoppt
wird. Besonders Nebel- und Dampftröpfchen bilden so viele mikroskopisch kleine Spiegel,
daß die Triggerschwelle sehr schnell erreicht wird. Das Problem läßt sich prinzipiell
dadurch umgehen, indem man nicht eine Stoppuhr verwendet sondern mehrere. Bei
jedem Echopuls wird eine Zwischenzeit gemessen. Der letzte eintreffende Echopuls
liefert dann den hoffentlich richtigen Abstand zum Messobjekt.
Ein anderes Problem bilden Kantentreffer. Dabei trifft nicht der ganze Messfleck auf das
Messobjekt, sondern nur ein Teil. Trifft der Rest des Meßstrahls kurz darauf auf einen
anderen Teil des Messobjektes, können sich diese beiden Echos im Empfänger zu einem
breitem Echopuls vereinigen. Wird dieser 'zu breit' gemessene Echopuls dann
entsprechend der Kennlinie kompensiert, führt das zu einem deutlich sichtbaren
Messfehler.
Copyright © 2005-2006 Dipl.-Ing. A. Ewald. Keinerlei Gewähr für Richtigkeit und Aktualität.


